
之前買了一組得寶的火車,小朋友玩的很開心,後來發現可以用藍芽app進行控制,可是我又不想讓小朋友玩手機,於是就決定要實體化!
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(95)

根據上次得到的結果花了點時間看了一下整個系統大概分成兩個部分
alpr部分主要負責將圖片中的車牌框出來,並且將車牌中的每個字給切出來給ocr做辨識
Mr Sitdownplz 發表在 痞客邦 留言(1) 人氣(1,932)
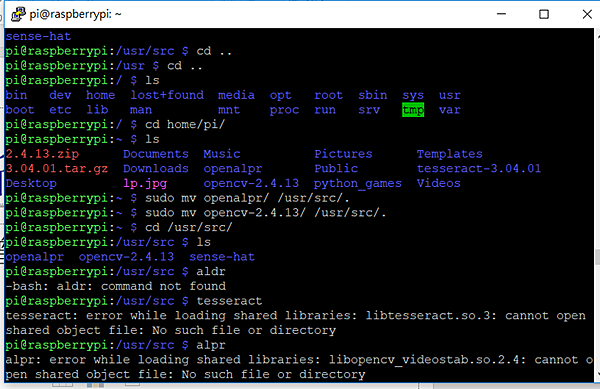
先前在網路上看到了一篇文章提到國外有人使用了樹莓派架設了OpenALPR車牌辦識系統,並且使用了nods.js將攝影機每秒拍下一張照片並由openALPR進行辨識。
https://softnshare.com/note-diy-license-plate-scanner-built-with-a-raspberry-pi
我覺得這個案子還滿好玩的,而且自己手邊剛好有可以拿來玩的樹莓派,因此也來試著自己弄看看, 先來試看看辨識度如何。
上網看了一下一些資料,發現其實有滿多可以參考的資料,大多都可以照著一步一步來完成,而我這邊參考的是如下網址
Mr Sitdownplz 發表在 痞客邦 留言(1) 人氣(2,853)

在以前要控制一整排的 rgb 三色led總是需要接很多線及花很多的mcu 腳位才能完成,隨著科技的進步,現在只需要三支腳位就可以了(vcc signal gnd)
這兩天把買來很久的rgb ring ws212b -16 拿出來玩玩看
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(203)
1.前言
為了完成使用line去控制電燈及家電的目標,因此我們必需先來學習一下line bot的控制方式,line提供了一個messaging api給開發人員使用,讓其可以接收或回覆訊息給好友。
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(5,151)

先前曾經寫過一篇藍芽電燈開關的文章 http://mrsitdownplz.pixnet.net/blog/post/396509869-%E8%97%8D%E8%8A%BD%E9%9B%BB%E7%87%88%E9%96%8B%E9%97%9C
後來因為要做個模組給朋友,因此就直接LAYOUT洗板子了,不過這次做的只有單一通道(只控制一CH的電燈),但增加了電流監控的功能
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(72)

GPS格式
這次選用的GPS模組為 UART-GPS-NEO-7M-C ,GPS與天線在同一塊模組上,出來的接線只需要接TX, RX, VCC, GND即可動作,而其使用的通訊格式是NMEA格式,BAUD RATE為9600
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(147)

最近的案子都剛好有用到馬達,因先前沒學過馬達控制,因此花了點時間學習了一下,而且最近使用的馬達是不同的型式,所以上來記錄一下
馬達的種類有許多,例如: DC直流馬達,交流馬達,伺服馬達,步進馬達…等。不同類型的馬達其控制方式就有不同
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(567)

秋天到了,天氣開始慢慢的變冷了,為了迎接馬上就快要到來的冬天,必需要來弄個遠端電燈控制器才行!
要不然天氣一冷,一定會不想下床關燈的!!~
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(1,682)
.jpg")
好久沒來寫文章了
來聊聊最近無聊做的一個小東西吧
Mr Sitdownplz 發表在 痞客邦 留言(0) 人氣(66)